Redazione del Piano Urbano della Mobilità Sostenibile del Comune di Prato
CLIENTE: Comune di Prato
PERIODO: 2015 – 2016
TRT, sulla base di una procedura di gara, è stata selezionata dal Comune di Prato per supportare la propria struttura tecnica nella redazione del Piano Urbano della Mobilità Sostenibile (PUMS). Il Piano assume come riferimento di metodo le linee guida SUMP predisposte dalla Commissione Europea (con il contributo, tra gli altri, di TRT).
L’attività di redazione del PUMS ha comportato:
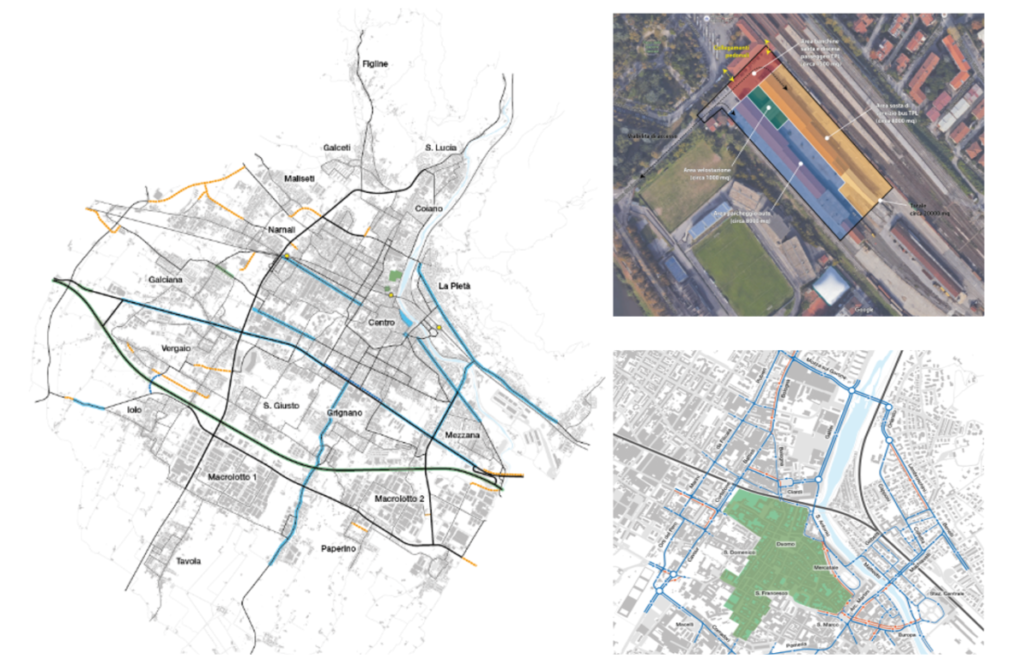
- la ricostruzione del quadro conoscitivo relativo al sistema della mobilità a Prato e ai suoi impatti ambientali, sociali ed economici;
- l’individuazione delle strategie che hanno guidato la costruzione degli scenari PUMS, sulla base del quadro conoscitivo, degli obiettivi selezionati e delle priorità emerse dall’attività di ascolto della popolazione e degli stakeholder territoriali;
- il disegno degli scenari alternativi di piano: Scenario di Riferimento e Scenario di Piano costruito sulla base di un set di misure tra loro coerenti e che rispondono agli obiettivi e alle strategie selezionate;
- la valutazione degli scenari attraverso l’applicazione di un modello di traffico AIMSUN e del modello MOMOS messo a punto da TRT per la valutazione delle politiche di mobilità sostenibile.
La proposta di piano è stata presentata pubblicamente ad ottobre 2016. Il PUMS è stato adottato con Delibera del Consiglio Comunale n. 83 del 24/11/2016 e Approvato con delibera di CC n. 51 del 01/06/2017.
TRT è stata anche responsabile della redazione del Piano della Sosta e il Piano Generale del Traffico Urbano della città di Prato
Nel 2022, TRT ha anche redato il Piano della Mobilità Elettrica di Prato e realizzato il Monitoraggio del PUMS in accordo con gli indicatori del DM 396 of 28/08/2019.
Per approfondimenti
- Pagina del PUMS sul sito del Comune di Prato. Contiene tutte le informazione relative al processo di redazione del Piano.
- Pagina nella quale è possibile scaricare i documenti prodotti e relativi allegati.
- Link per scaricare il documento finale di Piano approvato.